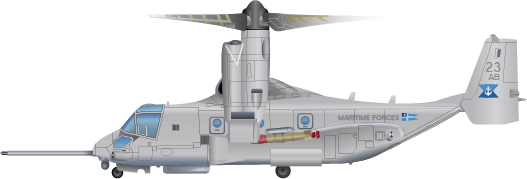
PV-22 GANNET
|
|
|
Crew: 2 crew (pilot, co-pilot) + 3 operators (combat information centre officer, tactical action officer, detection system operator)
Length: 17.48 m Height: 5.46 m Overall height (with nacelles vertical): 6.73 m Cabin length: 7.37 m Cabin width: 1.8 m Cabin height: 1.83 m Wing area: 28 m² Aspect ratio: 5.5 Wingspan: 14.02 m Width with rotors turning: 25.78 m Disc area: 212 m² Operating empty weight: 15,177 kg Maximum take-off weight (for self-deployment/in-flight refuelling): 27,443 kg Maximum rolling take-off weight: 25,909 kg Maximum vertical take-off weight: 23,495 kg Maximum cargo volume: 24.3 m² Maximum internal payload: 9,072 kg (20,000 lb) Powerplant: 2 × Rolls-Royce Allison T406/AE 1107C Liberty free-turbine turboshaft Power per engine: 4,586 kW (6,150 shp) at takeoff, 3,275 kW (4,392 shp) continuous, 4,415 kW (5,920 shp) one engine inoperative Propellers: 3-bladed propeller, 1 per engine Rotor diameter: 11.61 m Internal fuel capacity: 7,722 L (2,040 US gal) JP-8 (MIL–DTL–83133)/Jet A kerosene-type aviation turbine fuel Maximum level speed (at sea level in aircraft mode): 275 knots Maximum cruise speed (at sea level in airplane mode): 250 knots Maximum cruise speed (at sea level in helicopter mode): 100 knots Maximum forward speed with slung load: 214 knots Take-off ground roll: 152 m (500 ft) Combat radius: 740 km (400 nm) Endurance (10% fuel reserve): 5 hours Ferry range: 3,892 km (2,100 nm) Service ceiling: 7,315 m (24,000 ft) One engine inoperative (OEI) service ceiling: 2,896 m (9,500 ft) Hover out of ground effect (HOGE) ceiling: 1,737 m (5,700 ft) Rate of climb: 11.8 m/s (39 ft/s) Glide ratio: 4.5:1 Disc loading: 102.23 kg/m² Power-to-weight ratio: 427 W/kg Maximum design g-load: +3.0 g to −3.0 g Armament Hardpoints:
Torpedoes: 4 × 12¾" (324 mm) lightweight torpedo Missiles: 2 × Antiship Missile Sonobuoys: 36 × 'F' size passive + 12 × 'G' size active Avionics Mission systems:
Defensive aids:
Navigation aids:
Communications:
|
The PV-22 Gannet is a mid- to long-range, multi-mission, tiltrotor maritime patrol aircraft that can operate from aircraft carriers and amphibious assault ships or forward deployed from the flight decks of large surface combatants. Tiltrotors are compound aircraft that combine the vertical take-off and landing (VTOL) and hover capability of a helicopter with the high speed of a fixed-wing turboprop aircraft, with the ability to convert between each mode using a pair of pivoting proprotor engine nacelles. These factors provide a greater range, dash speed, loiter endurance, sortie rate, time on station and payload capacity than a conventional helicopter. The PV-22 flies unpressurised at altitudes up to 7,620 m (25,000 ft), with breathing masks for the crew and anti-ice/de-icing capability with heated intakes and rotor blades.
The PV-22 is equipped with mission systems for anti-submarine warfare (ASW), anti-surface warfare (ASuW), combat search and rescue (CSAR), electronic intelligence/electronic warfare (ELINT/EW), airborne early warning and control (AEW&C) and mine countermeasures (MCM) roles. It differs from the multipurpose V-22 models with provision for additional fuel tanks, a full suite of acoustic and non-acoustic mission sensors, a sonobuoy dispenser and retrieval system, folding pylon stations for anti-ship and anti-submarine armament, and a combat information centre (CIC) in the main cabin to manage all sensors and weapons. The PV-22 is primarily designed for the ASW outer zone screen role operating at a nominal cruise speed of 250 knots with a time-on-station of 4 hours at an altitude of 914 m (3,000 ft) plus 1 hour transit time at 3,048 m (10,000 ft). It has a mission-payload capability to operate effectively in "mid" and "outer" operations area protection zones 200-400 nautical miles (nm) from the launch ship. It can patrol a station area 120 nm by 60 nm (24,695 km²) twice in one sortie by combining its helicopter hover performance with in-flight conversion to high speed fixed-wing configuration for fast transits between zones. Mission sensors include an electro-optic/infra-red (EO/IR) turret for passive long-range detection of surface targets, a long-range surface surveillance radar, an electronic support measures (ESM) system able to identify targets by their radio frequency (RF) emitters, and by reel-deployed active dipping sonar, laying of sonobuoy fields and magnetic anomaly detectors (MAD) to search for, detect, classify, localize, and track submarines, particularly in littoral areas. The mission systems are managed by a crew of five consisting of two pilots on the flight deck (with two optional seats for observers), and three operators in the rear cabin. Mission systems are mounted in modular roll-on/roll-off (RORO) pallets inside the cabin (described below) allowing ad hoc conversion of individual aircraft to other roles such as airborne early warning, search and rescue, aerial tanker, and fleet cargo and troop transport roles. The airframe, wings and chord rotor blades are primarily constructed of graphite-reinforced epoxy composite material (by weight, 59% carbon fibre, 10% glass fibre, 20% metal and 11% other materials). Carbon fibre composites grant the aircraft maximum stiffness at given weight, corrosion and ballistic resistance (with the fuselage and self-sealing fuel cells armoured to resist .50 cal rounds), high crashworthiness, low radar cross-section (RCS) and low Doppler signature. The fuselage has a box configuration optimised for transport and features stub wings and engine nacelles, an upswept rear, unswept tailplane with twin fins of moderate sweepback, wide landing gear sponsons and an open cargo bay. Access is via a two-piece door/ramp that has an upper door that tucks away into the roof of the hold. Modifications from the V-22 include deletion of the external cargo hooks for carrying slung loads and a new opening in the floor provided for the chute of a sonobuoy dispenser system. The proprotors and engines are mounted at the tips of high-mounted, constant-chord wings with a slight forward sweep. For high survivability the cockpit and cabin can withstand impacts of up to 25 g. The wide sponsons provide a wide base for buoyancy during sea splashdowns, and the wings and rotor nacelles are built to safely detach without colliding with the fuselage in a crash. The landing gear is a retractable tricycle type with twin wheels including a steerable nose unit, hydraulic carbon multi-disk brakes, and two-stage oleopneumatic shock absorbers with hydraulic standby systems on each unit. The cockpit is fitted with large windscreens, side windows, overhead windows, and knee windows for maximum visibility. The windscreen is designed for bird-strike protection and the entire cockpit provides aircrew protection from .30 cal threats with boron carbide/polyetheylene laminate crew seats. The pilot and co-pilot are seated in Martin-Baker MK 10E zero-zero ejection seats. A passageway leads from the cockpit into the rear bay, with a folding jump seat installable on the cockpit door and a second jump seat on a avionics rack in the passageway. These seats are reserved for use by crew chiefs, flight engineers, observers or passengers. The box rear cabin has three side window/escape hatches, an overhead ditching hatch to facilitate emergency cabin egress and a rear door ramp. The cabin offers 20.9 m³ of loadable volume and total 9,071 kg (20,000 lb) payload capacity in common with the CMV-22B model. A cargo roller conveyor system with flush rails is mounted in the cabin using a 907 kg (2,000 lb) capacity variable-speed hydraulic hoist/winch and pulley system with 45 metres of steel cable for easy RORO loading of cargo and mission pallets. The cargo bay is multi-mission configurable with provisions for everything from troop transport to heavy equipment resupply. The cargo system is primarily used to load and lock in place the prime mission system containing an auxiliary fuel tank, combat information centre (CIC) and sonobuoy dispenser on missionised pallet modules. When removed the aircraft can be reconfigured for personnel transport with 24 crashworthy troop seats, fleet transport to carry 48"×48" warehouse pallets or two 463L half pallets, or with a palletized aerial refuelling system (described below). Conversion between roles takes 1½ to 2 hours. The PV-22, in common with other members of the V-22B Osprey family, is powered by twin lateral Rolls-Royce Allison T406/AE 1107C Liberty free power turbine turboshaft engines. The engines drive three-bladed contrarotating proprotors, with high-twist composite blades and elastomeric bearings, in rotating nacelles at each wing tip. Powered tilt actuators rotate the complete engine pods through +97°/-30° to adjust the engine/rotor pitch between forward flight and hovering flight. Each engine is rated at 6,150 ship horse-power (shp) maximum power at take-off and at 4,392 shp maximum continuous power, with a 6,830 shp intermediate/contingency power capability. A dual-channel full authority digital engine control (FADEC) system manages the engines and rotors. A power actuated blade fold/wing stow system folds the rotor blades and swivels the whole wing and the engine pods over the fuselage for stowage in hangar bays and creating a compact parking spot factor to fit on carrier elevators. The wing is mounted by a steel flexring that rotates 90° parallel to the fuselage for stowage and is locked by four hydraulically-actuated steel pins. The system operates without interfering with the function of interconnected drive shafts and transmissions buried in the wing, a midwing gearbox that drives the tilting mechanism, or gas turbine auxiliary power unit (APU) located inside the wing torsion box. In a one engine inoperative (OEI) situation the surviving engine can drive both proprotors via crosscoupled transmissions, allowing continued flight and a safe roll-on landing at a 60 knot glide velocity. In a two-engine failure emergency the system automatically unlocks the rotors to enable a helicopter-style autorotation landing. The proprotors feature pendulum absorbers on the rotor masts to reduce random vibration and tail buffeting while converting between the helicopter and plane flight modes, and have locks to prevent rotation and rotor strike while on the ground. An electromechanical active vibration system in the forward fuselage further acts to reduce or cancel vibration in the cockpit and cabin. The engine inlets are fitted with Engine Air Particle Separators (EAPS) that filter dust and particulates from the airflow, and Engine Infra-Red Emission Suppressors (EIRES) that mix engine bleed air with hot exhaust gasses to reduce thermal signature. The fuel system is integrated into the wings and fuselage and distributed in multiple fuel tanks around the airframe to optimise the centre of gravity (cg). This includes a 430 US gal Mission Auxiliary Tank System (MATS) installed in the cabin, two forward sponson tanks, a right aft sponson tank and four flexible tanks in each wing. The total fuel capacity is 2,040 US gal (7,722 kg) of JP-8 kerosene-type aviation turbine fuel held in self-sealing/explosion resistant fuel cells armoured to resist up to .50 cal armour-piercing rounds. Fuel is fed to the engines via an 88 US gal feed tank just inboard of each wingtip with crossfeed/cross transfer fuel lines and valves. The automatic transfer sequence empties the MATS internal cabin tank first, the right aft sponson next, followed by the wing tanks and then both the left and right forward sponson tanks, with 30 minutes of reserve/emergency fuel held in the feed tanks in case of failure of the fuel system. The aircraft takes on fuel from a retractable inflight refuelling (IFR) probe under the nose and a single point pressure refuelling point on the rear fuselage with a connector supporting hover-in-flight refuelling (HIFR) and fuel dumping. A palletised V-22 Aerial Refuelling System (VARS) can be installed in place of the mission system or cargo to offer probe-and-drogue air-to-air refueling (AAR) to other aircraft. While designed for the CMV-22B cargo space it also allows an PV-22 to be stripped and converted to perform staging and recovery tanking missions. VARS comprises two 430 US gal (1,628 kg) MATS auxiliary fuel cells mounted in the cabin, augmented by 1,720 US gal (6,551 kg) of internal fuel from the aircraft's fuel reserves, a Cobham FR300 Hose Drum Unit (HDU) feeding a 50 mm rubber hose through a special hose slipway on the rear ramp door, an emergency guillotine to sever the hose if it tangles, a cabin air refuelling operators station, and refuel signal lights mounted on the ramp exterior for guiding in receiver aircraft. The hose extends to 28 metres and can offload 120 gallons per minute (gpm) of fuel to an aircraft while flying 3,048 m (10,000 feet) above-sea-level (ASL) at a nominal speed of 230 knots. An environmental control system provides collective nuclear, biological and chemical (NBC) protection for all crew maintaining a constant overpressure (0.062 bar in the cockpit and 0.048 bar in main cabin), utilising an On-Board Oxygen Generation System (OBOGS) that enriches ambient air by filtering out the oxygen from engine bleed air using molecular sieve technology and passing it through heat exchangers for air conditioning. The aircraft is not pressurised and crewmembers wear oxygen masks above 10,000 ft altitude. Fuel tank pressurisation and explosion suppression is provided by an On-Board Inert Gas Generating System (OBIGGS) that produces nitrogen-enriched inert gas by filtering oxygen out of ambient air. Electrical power, including pumps for hydraulics and pneumatics (flight controls, landing gear, rear ramp, winches, etc), and power for ground checkout, engine starting, and the environmental control system during flight, is provided by twin 40 kVA constant frequency AC generators and twin 50/80 kVA variable frequency DC generators (one driven by the wing box APU) via rectifiers. A 24 Ah lead-acid battery pack provides 20 minutes worth of emergency flight power. Moog actuators move the flight controls including wing flaperons (combination flap and aileron), elevators, and twin vertical tail rudders. Flight controls consist of a triple-redundant digital fly-by-wire (FBW) flight control system with four-axis automatic stability control and autopilot, that provides hands-off attitude, heading and altitude hold, predictive windshear and vortex hazard warnings. Safe handling from rolling decks is provided by automatic structural load limiting (SLL) and gust alleviation subsystems. The modernised avionics is based on the Integrated Avionics System (IAS) with dual-redundant Multi-Bus System (MIL-STD-1553B) digital buses that integrate the flight and mission computers (General Dynamics Type 3 Advanced Mission Computer (AMC) architecture with commercial-off-the-shelf (COTS) PowerPC processors), multi-band VHF/UHF communications and Link 16 tactical data links, aircraft and mission sensors, navigation and collision alert systems, threat-warning receivers, integrated defensive aids system and countermeasure dispensers. A Normalair-Garrett mission recorder stores any mix of four channels of raw acoustic data, cockpit voice communications and time-code data, processed acoustic display data and avionics information. Piloting is by a conventional aeroplane stick, rudder pedals and thrust control level (TCL) that automatically functions as a cyclic stick, yaw pedals and collective control in helicopter mode. The side-by-side cockpit layout has duplicate controls for the pilot and copilot including dual heads-up display (HUD) units compatible with AN/AVS-7 ANVIS/HUD (Aviator's Night Vision System/Head-Up Display) helmets, a 'glass cockpit' with four night vision (NVIS) goggle compatible individually programmable Barco multifunction displays with active matrix liquid crystal display (AMLCD) screens, and a centre column standby flight display with two keypad entry units from which the flight crew can control most aircraft functions. The rear cabin is fitted out with a roll-on/roll-off (RO/RO) palletised mission module provided with standard electrical and data connectors for integration into the avionics and mission suite. The pallet contains equipment racks for mission computers with acoustic (sonics) and radar processors, and three ruggedised Barco tactical mission consoles for the mission crew of combat information centre officer (CICO), tactical action officer (TAO) and detection system operator (DSO). A secure intercommunication system (ICS) provides access to all radios and intercom voice channels on noise-cancellation helmets/headsets worn by the cockpit and cabin crew. Each rugged console/workstation is based around a triple-head display system configured around a 60 cm (1920×1200 pixel) widescreen display unit, 30 cm (1024×768 pixel) interactive display unit and 30 cm (1024×768 pixel) projected capacitive (PCAP) touch screen control unit. These present processed data in multiple formats, such as waterfall plots of acoustic data and plan position indicator (PPI) display of raw and synthetic radar video, fused with operator decision aids to reduce crew workload including auto-alert management, automatic multiple target tracking, sensor correlation, classification tools and performance prediction. The main acoustic sensor is the AQS-960 FLASH (Folding Light Acoustic System for Helicopters) dipping sonar with AQS-950 acoustic processing system. It is an omnidirectional low-frequency (LF) active/passive wideband sonar capable of submarine detection and tracking, passive acoustic intercept, underwater telephony and bathythermal data collection. The submersible unit or 'wet end' contains a sonar transmitter/reciever with high power waveform generator, piezoelectric transducer with omnidirectional pulser, and a receiver array with 24 staves on 12 hydrophone stare arms. Deployment is by a hydraulically-driven (with backup hand-crack) single pulley reel subsystem that can payout up to 762 metres of Kevlar-reinforced coaxial cable to a maximum immersion depth of 750 metres. The dipping sonar is deployed through a hatch in the rear ramp door and operated from hover at an altitude of about 15 m (50 ft) after the search area has been narrowed based on a sonobuoy search (see below). The active sonar generates 24 preformed transmit/receive beams with 360° azimuth coverage to insonify the full water column, operating simultaneously in five transmission frequencies between 3-5 kHz, which is safely below the 5-140 kHz frequency range of marine mammals. Using narrowband long-duration continuous-wave (CW) pulses, broadband frequency-modulated (FM) chirps and sweeps, and combined linear and hyperbolic FM/CW pulse modes (COMBO), it can detect, track, classify and localise low Doppler/low echo strength targets even with anechoic hull cladding, in both the littorals and deep water, in cluttered and high noise environments or hiding under temperature inversions in the water. Processing and analysis of the raw acoustic data is by the AQS-950 sonics suite using a range of advanced signal processing and detection modes with TMA (Target Motion Analysis) on 12 tracks simultaenously and covering a full range of target noise characteristics including narrowband frequency lines, broadband signals, swaths and transients, and DEMON (demodulated noise) signals. The sonar is augmented by air-dropped passive and active free-floating sonobuoys that gather and transmit acoustic data to the aircraft over radio frequency (RF) data links. A Flightline Systems Wideband Software Defined Sonobuoy Receiver (SDSR) is integrated into the system with 99 separate VHF FM radio downlink channels. The AQS-950 processor can simultaneously receive and demodulate acoustic data in 14-bit raw format on either of two dipping sonar channels, one dipping sonar channel and 32 sonobuoy channels, or 64 sonobuoy channels. Sonobuoy tactics will be based on the use of passive directional buoys to detect, localise and identify low signature acoustic contacts by triangulation, and active omnidirectional buoys pinging the water to increase probability of detection and to gain range, bearing and speed data on a target for computing firing solutions. An aircraft will initially drop a pair of data gathering buoys to calibrate its sensors, specifically a bathythermographic buoy to determine the speed of sound in water through local sea temperature, pressure (a function of depth) and salinity measurements and the depth of the thermocline, and an omnidirectional passive buoy to measure ambient noises produced by marine life and other ocean sources so these sounds can be filtered out by software. The aircraft will then lay a sonobuoy field in any number of search patterns, such as parallel, creeping line, sector search or barrier patrol patterns inside a predefined search area. The aircraft is equipped with a Sequoia Dynamics Airborne Gas Inflator Lightweight Ejector (AGILE) that deploys different types of expendable or deployable/retrievable sonobuoy from altitutes up to 914 m (3,000 ft). It is a fully automated lightweight self-powered system using automotive airbag inflators to eject sonobuoys out of a drop chute in the belly of the aircraft. A mix of miniaturised 'G' size active buoys and 'F' size passive buoys, respectively one-half and one-third the length of legacy full-length A' size buoys, are stored in a chain-driven linear magazine. An operator can select and load any type of sonobuoy, program its sonar frequency and time delay, and launch it automatically from a cabin console. A full range of deployable sonobuoys is accommodated, including:
A robotic gravity hook grappling system is fitted to the AC-powered rescue hoist on the starboard cabin door, allowing recovery of buoys from a 12 m (39 ft) hover altitude. A GPS receiver and VHF AM direction finder provides On-Top Position Indicator (OTPI) and Sonobuoy Positioning System (SPS) functionality for locating and tracking the sonobuoys. Submerged and buried targets can also be detected with twin CAE MAD-XR (Magnetic Anomaly Detection-Extended Role) systems based on a high sensitivity geomagnetic sensor that detects, localises and tracks magnetic dipole targets at ranges up to 1,200 metres using GPS coordinates. The compact sensors weigh only 1.5 kg each and consist of a high sensitivity total field magnetometer, based on multi-pass atomic vapour cells, that sense local distortions or anomalies in the geomagnetic field created by undersea/submerged and buried metallic objects; and a three-axis vector magnetometer that senses and filters background noise including movement in gradient fields by aircraft motion. The dual detectors are tail mounted to minimise magnetic interference and for high spatial resolution. Realtime tracking algorithms localise target position, velocity, and trajectory with GPS accuracy. The main active sensor is a Telephonics AN/APS-147 Multi Mode Radar (MMR) mounted underneath the forward fuselage to provide full 360° azimuth search coverage within an area of 77,700 km². It is configured as a rotating flat-plate planar antenna array fitted into a low profile radome stabilised for ±30° in pitch and roll. It is a low probability of intercept (LPI) radar using low peak power waveforms with frequency agility and pulse compression techniques to minimise counter-detection, and has an automatic target recognition (ATR) system that processes synthetic aperture/inverse synthetic aperture (SAR/ISAR) imagery to classify ship targets from their pitch, roll and yaw motions. A Fibre Channel Switched Fabric (FCSW)/MIL-STD-1553B digital databus and VHF datalinks integrate the radar with other sensors. Capabilities include high sea state/high clutter rejection filtering, high range resolution small target detection especially of submarine periscopes and snorkels in high sea states, low flyer detection of sea-skimming missiles, automatic target detection/tracking, track-while-scan (TWS) automatic tracking of 20 targets, air search with Moving Target Indication (MTI), spotlight/strip map SAR/ISAR modes to image continuous swaths or fixed/geodetic sea or land surface points in high resolution, over-the-horizon-targeting (OTHT) to localise and coordinate attacks on surface targets, electronic support measures (ESM) and countermeasures proofing (including sector blanking and staggered pulse repetition frequencies), weather (WX) detection and avoidance, all-weather navigation, and search and rescue transponder (SART) aids for geolocation of emergency locator transmitters. The radar also integrates a Telephonics AN/UPX-43(V)1 All-Mode Monopulse Identification Friend or Foe (IFF) Interrogator for operation in mixed military/civilian air space. An AN/ALQ-210 Electronic Support Measures (ESM) Situational Awareness and Threat Warning System provides passive electronic detection, classification and localisation of ground, sea and airborne emitting radio frequency (RF) transmitters. It is based on multiple high bandwidth digital multi-function baseband receivers positioned around the aircraft for high spatial coverage and high-performance multi-core mission processors. It is fully autonomous in operation using preloaded emitter libraries and tactical decision aids including Specific Emitter Identification (SEI) and digital modulation analysis algorithms for high probability of detection and accurate identification. The system processes and correlates data from its own receivers and other sources (radar, IFF, sonar, etc) into a single tactical picture for enhanced battlespace situational awareness. Capabilities include detection and tracking of low signature targets in high clutter and jamming environments, high discrimination and tracking of surface targets in open ocean and littoral conditions, real-time surveillance and intelligence gathering on air and surface emitters, and integration with defensive electronic warfare systems (radar warning receivers, electronic countermeasures jammers, etc). The PV-22 can also equip with a plug-and-fight airborne early warning (AEW) role-fit mission system comprising a pair of Vigilance radar sensor pods, based on the El/M-2052 active electronically scanned array (AESA) coherent pulse Doppler fire control radar, that are mounted port and starboard on stores hardpoints. Each pod contains two antennas populated with 320 solid-state transmit/receive (T/R) microwave modules that each electronically scan a sector 120° in azimuth and 60° in elevation, with mechanical gimbals to expand the field of regard to provide full 360° coverage from the dual radar sets. Vigilance takes only 4 hours to install and is a minimal change modification to the airframe that recycles workstations and processors from the acoustic suite, requiring only a change of personnel and loading of different mission software. The Vigilance pod weighs only 300 kg (661 lbs), equivalent to that of a lightweight torpedo, and comprises a rigid frame mounting a fully self-contained mission suite with radar sensors, mission processors, IFF interrogator, GPS/INS navigation equipment, ESM intercept subsystem, power supply and closed-loop liquid cooling system. The El/M-2052 radar system has full look-up/look-down capability with 12 air-to-air modes, 12 air-to-ground modes (including two maritime modes: sea search and ship target track), 4 electronic warfare modes, 4 navigation modes and 2 weather radar modes. The radar supports track-while-scan multi-target detection and tracking of up to 64 targets, with MTI (moving target indication), very high-resolution SAR (synthetic aperture radar) mapping, DBS (Doppler beam sharpening) and RBM (real beam map) modes, high electronic countermeasures (ECM) immunity, clutter rejection/filtering, and ultra-low sidelobe antennas to minimise counter detection. The main passive sensor is an AN/ASX-4 Advanced Imaging Multi-spectral System (AIMS) equipped with large-aperture lenses for long-range stand-off surveillance, detection, identification, tracking and designation of targets. Based on the commercial MX-20D turret it is chin-mounted under the aircraft's nose in a motorized six-axis gyrostabilized turret with 360° azimuth scanning and +90° to -120° elevation gimbal limits. The turret has six all-digital sensor payloads with all channels processed simultaneously: (a) high magnification 3-5 μm short-wave infra-red (SWIR) staring array thermal imager with four-step zoom lens; (b) daylight continuous zoom TV camera with wide and narrow fields of view and (c) daylight spotter camera with 3,000 m spotter lens, both with 2-megapixel 3-CCD colour sensors capable of 1080p HD resolution; (d) low light spotter camera with electron-multiplying 1-CCD monochrome sensor; (e) 20 km range eye-safe diode-pumped laser designator/rangefinder coded to standard guidance frequencies; and (f) 30 km range narrow field laser spot tracker/illuminator with quadrant detector. All the sensors have haze penetration, motion scanning and automatic video tracking capabilities, with self-designation of targets by laser and integrated GPS/INS for accurate geolocation that can exchanged with friendly units by datalink. The PV-22 can carry up to a maximum of four external stores/weapons weighing a maximum of 794 kg (1,750 lbs) each, arranged in pairs on each of two articulated stub wing pylons mid-mounted on the fuselage. The pylons project over each sponson allowing easy access for ground handling and sufficient clearance for the freefall drop of munitions in hover or flight mode, with the store safely falling away to the rear of the aircraft by gravity and wind effects. The attachment to the fuselage includes a power actuated fold mechanism allowing the entire pylon to fold flush against the side of the fuselage to maintain a standard V-22 envelope for spotting in hangars. Munitions are carried on standard BRU-14/A ejector racks equipped with electro-mechanical suspension and release mechanisms and a MIL-STD-1760E Aircraft/Store Electrical Interconnection System to interface the aircraft stores management system. A loadout can contain four 12¾" (324 mm) lightweight torpedoes. There is also a more limited capacity to carry anti-ship missiles with only two being accomodated, one on each outboard stores station due to wingspan, such as the Naval Strike Missile or AGM-84N Harpoon. The pylons can also be removed from the fold mechanism to reveal a single mounting point with electrical and data connectors for mounting payloads including the Vigilance radar sensor pods described above.  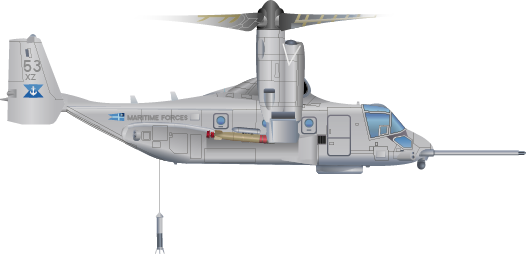 |
